Connecter le robot mBot
Avec mBlock : mBlock - Programmation du robot mBot
Premier exercice
Afficher la distance entre le robot mBot et un obstacle.
Connecte le robot à mBlock. Attention, commutateur en mode « En direct »

Dans le menu "Détection", coche "Distance mesurée par le capteur ultrason du port..." en veillant bien que le port sélectionné correspond au port du capteur ultrason sur la carte mCore.
Place un livre devant le capteur, la distance mesurée doit s’afficher dans la scène. Déplace le livre pour voir la distance varier.
Deuxième exercice
Algorithme :
Si la distance mesurée par le télémètre à ultrason (port 3) est inférieure à 10, alors le robot mBot s'arrête sinon le robot mBot avance.
Avec mBlock
Reproduis le programme ci-dessous !
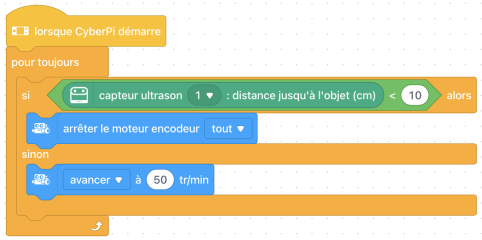
Algorithme :
Si la distance mesurée par le télémètre à ultrason est inférieure à 10, alors le robot mBot s'arrête sinon le robot mBot avance.
Attention, il faut maintenant passer en mode « Téléverser » et ensuite « Télécharger » le programme sur le robot.
À la fin du téléchargement, le robot doit se mettre en marche jusqu'à ce qu'il rencontre un obstacle !
Avec Vittascience
Troisième exercice
Algorithme :
Si la distance mesurée par le télémètre à ultrason est inférieure à 10, alors le robot mBot s'arrête 0,5 seconde puis tourne à droite de 90° sinon le robot mBot avance.
À toi de programmer !